I crashed my quadcopter last week due to flying out of range of my transmitter, causing my quadcopter to drop out of the sky. This happened because I hadn’t calibrated my throttle failsafe properly.
This is for my Spektrum DX8 transmitter and AR8000 receiver, but it’ll be the same for most Spektrum devices (and the theory is most likely the same for any transmitter/receiver)
The theory
The theory is simple: Your receiver records your transmitter’s throttle position when you first bind them together. From then on, if the receiver loses contact with the transmitter, it defaults to outputting that throttle setting to your flight controller.
So usually, you’d make sure your throttle is down when you bind. So then, if you’re flying along at high throttle and go out of range, the receiver will just throttle down (and your quadcopter will drop out of the sky like a potato without a parachute).
Most flight controllers (mine is an APM 2.5 running ArduCopter 3.1.1) are able to land (or return to the launch point) automatically, but it needs to be able to differentiate between losing signal and you just throttling down (maybe you’re doing a stunt, or testing Newton’s law of universal gravitation).
The trick is, to have your transmitter output a lower throttle setting than the lowest stick position when you bind it to the receiver. That will allow your flight controller to tell the difference between you throttling down, and your receiver going into failsafe mode.
Throttle down low
There are a couple of ways to get your DX8 transmitter to go lower than the lowest throttle tick position but the simplest I found was setting the throttle travel setting temporarily:
- power on your DX8
- click the roller on the right to bring up the function list
- select “Servo Setup”
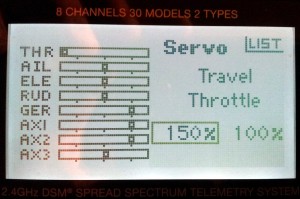
- select “Travel” and “Throttle” (actually the defaults)
- change the left hand “100%” up to the highest it’ll go (for my DX8 that was 150%)
- click the back button to get back out to the menu
- power off your DX8
Rebind
Now, your lowest throttle stick position is outputting a value of something like 920 to your flight controller. Now you go through the binding procedure. As a reminder:
- power transmitter and receiver off
- connect your bind adaptor to the bind plug on your receiver
- power on your receiver
- power on your transmitter whilst holding down the bind button (make sure your throttle is down!)
- wait for bind to complete
- power everything off and remove bind plug from receiver
- power everything back on, make sure binding worked.
Now you go back into the “Server Setup” menu on your transmitter and reset the travel back down to 100%, so your lowest throttle stick position is back to normal (around 1100).
So now, your lowest throttle stick position outputs something like 1100 to your flight controller, but if you power off your transmitter it will drop to something around 920.
Configure your flight controller
Now you can configure your flight controller to land, RTL or quantum leap or whatever when it can detect that it is out of range. On my ArduCopter, the defaults were all good (anything below 975 detected as failsafe) – I just had to enable failsafe.
Comments
Great idea. So many people don’t check what will happen to their quad when the signal dies and that’s why there are so many fly aways.
I just finished my sk450 buildHere and the last thing I want is a fly away.
Was wondering if you lost some satellites or had a black spot with buildings and that’s why it drifted.
Anyway thanks for the onfo
Hey John,
Thank you for the detailed instructions!
Its better to work a little bit than let it fly away..
Anyways, keep up the great work!
Nice post Keep up the great work!